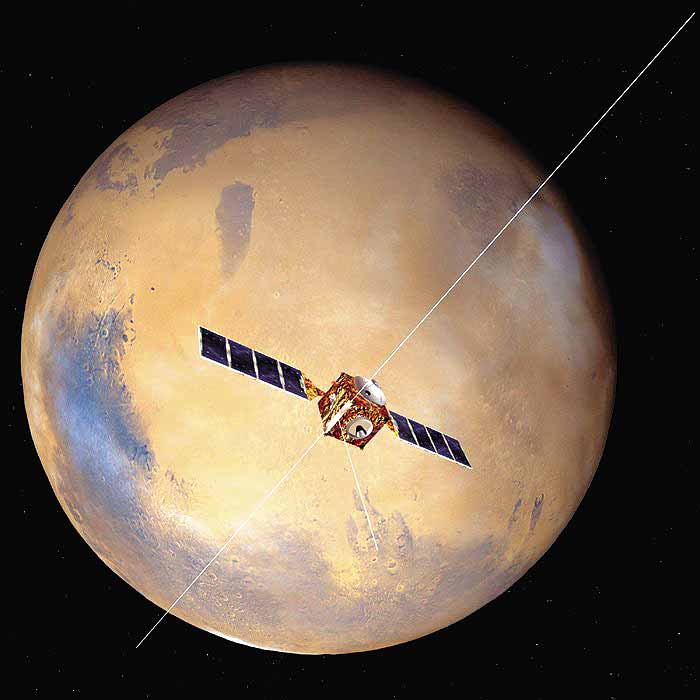
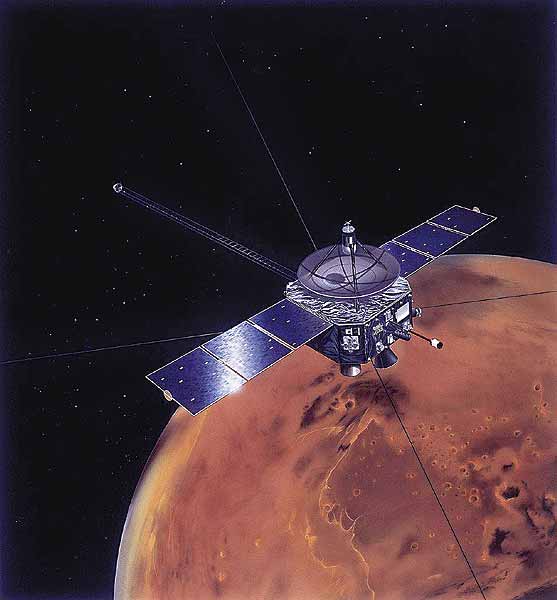
Istraživačke misije na Marsu Od kraja prošle godine možemo da vidimo Mars bolje nego ikada ranije i da otkrijemo brojne, do sada nepoznate detalje o njemu. Ovakve misije su, naravno, potpuno nezamislive bez intenzivne upotrebe računara na obe planete  U toku su dva odvojena projekta: Mars Express Evropske svemirske agencije (ESA) i NASA misija Mars Exploration Rover. Iako je cilj misija gotovo identičan, a oprema koja se koristi u njima slična, postoje velike razlike koje su uslovljene troškovima i raspoloživom tehnikom. Tako cilj Mars Expressa predstavljaju dve stvari: da u atmosferu Crvene planete postavi Mars Express Orbiter koji će istraživanja vršiti iz orbite Marsa i da na površinu planete spusti istraživačku sondu Beagle 2, autonomnu automatizovanu laboratoriju koja će nakon prizemljenja detaljno da analizira površinu Marsa iz prve ruke. U toku su dva odvojena projekta: Mars Express Evropske svemirske agencije (ESA) i NASA misija Mars Exploration Rover. Iako je cilj misija gotovo identičan, a oprema koja se koristi u njima slična, postoje velike razlike koje su uslovljene troškovima i raspoloživom tehnikom. Tako cilj Mars Expressa predstavljaju dve stvari: da u atmosferu Crvene planete postavi Mars Express Orbiter koji će istraživanja vršiti iz orbite Marsa i da na površinu planete spusti istraživačku sondu Beagle 2, autonomnu automatizovanu laboratoriju koja će nakon prizemljenja detaljno da analizira površinu Marsa iz prve ruke.
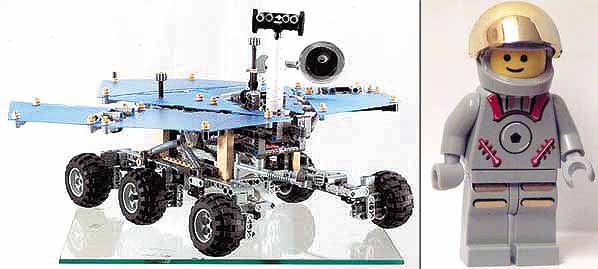
Američki Mars Exploration Rover, s druge strane, već ima deo svoje opreme na licu mesta. Srce programa NASA su dva identična rovera, Spirit i Opportunity. Oni mogu da komuniciraju i direktno sa Zemljom, ali u tome im pomažu sateliti Mars Global Surveyor i Mars Oddisey koji kruže oko našeg crvenog komšije od leta 1996. odnosno 2001. godine. Prvi od njih se spustio na Mars 3. januara u krater Gusev, a drugi je aterirao 25. januara sa druge strane planete, u Meridiani Planum. ") | | Pre nego što se roverima zadaju komande, pokreti se uvežbavaju u simulatoru na Zemlji, a trodimenzionalni model dopunjava se teksturama koje predstavljaju aktuelne slike sa Marsa (foto: NASA/JPL) |
Lenderi koji su nosili Spirit, Oportunity i Beagle 2 koriste isti koncept koji je 1997. godine slavni Sojourner koristio za prizemljenje. Prilikom „ateriranja” sonda se kreće ka planeti brzinom od 20.000 km/h, tj. oko 33 maha. Na dva sata od Marsa tajmer „budi” elektroniku i sletanje počinje. Dok uleće u atmosferu, toplotni oklop štiti sondu da ne sagori. Za neka tri minuta ovakvog padanja lender uspori na 1,5 maha, na oko 7 km visine od tla interni detektor ubrzanja otkriva da više nema usporenja i ispušta pilotni padobran koji dodatno usporava sondu. Kada se sonda uspori sa 1200 na 335 km/h, otvara se glavni padobran. Nakon odbacivanja toplotnog oklopa, aktiviran je interni radarski visinomerski okidač koji svakih 0,1 sekundi određuje visinu sonde u odnosu na tlo. Kada se lender nalazi na oko 275 m od površine, tj. oko 40 sekundi nakon otvaranja glavnog padobrana, uključuju se generatori gasa i za dve sekunde otvaraju oko sonde velike vazdušne jastuke. Okružen jastucima, lender udara o Mars pri brzini od oko 60 km/h i poput lopte odskakuje po površini. Kada se smiri, jastuci se odbacuju, a uređaj iz sonde je spreman za akciju. Ovaj način sletanja ima svojih mana – lokacija ateriranja može da se odredi tek približno. U slučaju Beaglea 2 to je elipsa prečnika 114 sa 46 km.Uprkos njihovoj sličnoj nameni, već na prvi pogled se vidi da su Beagle 2 i dva NASA rovera veoma različiti. Naime, Beagle 2 nije mobilan već je trebalo da sakupi uzorke samo sa lokacije na koju bi se spustio. Roveri, sa maksimalnom brzinom od 40 metara na dan i vekom trajanja od 90 sola (marsovskih dana), treba tokom svog radnog veka da prevale preko 1 km puta i analiziraju svoju okolinu. Roveri su prilično robusni i dizajnirani su na osnovu projekta Athena za rover koji je trebalo da učestvuje u otkazanoj misiji spuštanja na Mars 2001. godine. Kompletna težina sonde koja je spustila svaki od njih iznosi dobrih 820 kg, a sam rover teži 185 kg. Svaki od njih opremljen je identičnim naučnim instrumentima. To su dve panoramske kamere, mikroskop, spektrometar alfa-čestica i rendgenskog zračenja, Mössbauer spektrometar i minijaturni spektrometar termalnih emisija. Da bi došli do svežih uzoraka, roveri koriste glodalicu, prigodno nazvanu RAT (engl. pacov) ili Rock Abrasion Tool (alat za struganje stena), koja je u stanju da u bilo kojoj površini napravi rupu prečnika 45 mm i duboku 5 mm. Pri kopanju po mekim površinama kao što su pesak ili naslage prašine roveri jednostavno mogu da naprave rov svojim točkovima. Svaki rover je opremljen i sa tri magneta za ispitivanje magnetnih svojstava prašine. ") | | Deo Vallis Marineris, najvećeg kanjona na Marsu, dugačkog 1700 i širokog 65 kilometara. Slika je snimljena sa visine od 275 km i prikazuje površinu od oko 120.000 km2 (foto: ESA) |
U poređenju s roverima, Beagle 2 je perolaka kategorija. Težak je tek 68,84 kg, sam lender (tj. vozilo bez oklopa, padobrana i vazdušnih jastuka) ima 33,2 kg, a od toga samo 9 kg otpada na „naučni paket”, a sve ostalo je mehanika i zaštita. Ipak, i u tako malo pakovanje stali su rendgenski spektrometar, Mössbauer spektrometar, gasni analizatori sa spektrometrom mase, meteorološki senzori, dve stereo kamere i mikroskop. Pošto je nepokretan, robotska ruka Beagla 2 omogućila bi mu da istraži teren u radijusu od 70 cm oko sonde. Beagle 2 je takođe opremljen kopačem odnosno strugačem za uzimanje površinskih uzoraka, a „krtica”, tj. dubinski kopač trebalo je da bude prvi uređaj koji će na Marsu uzeti uzorak sa metar i po ispod površine tla.Nepokretnost Beagla 2 davala mu je ipak i određenu prednost nad roverima. Pošto ne bi morao da troši energiju na kretanje, vek trajanja bio bi mu bar 180 sola, što je duplo duže od rovera čiji je planirani „radni staž” 90 sola. Naravno, ovde treba napomenuti da su i lender i rover iz Pathfinder misije premašili svoj planirani radni vek: lender tri, a Sojourner čak dvanaest puta! ") | | Složeni krater na Olympus Monsu, najvećem vulkanu u Sunčevom sistemu. Slika prikazuje prostor prečnika od oko 100 kilometara (foto: ESA) |
Nažalost, Beagle 2 je završio svoju misiju pre nego što je ona i počela. Po planu, Beagle 2 se 17. decembra odvojio od Mars Expressa (koji je tada korigovao svoju putanju da bi lepo ušao u orbitu Crvene planete). Šest dana kasnije, Beagle 2 je aterirao u predviđenu zonu, ali nije uspostavio kontakt sa kontrolnim centrom. Zbog ograničenja u težini, Beagle 2 nema automatski odašiljač pomoću kojeg bi bio lociran, tako da je, po svemu sudeći, trajno izgubljen.No, naučnici iz ESA su brzo prežalili Beagle jer je glavni deo projekta i dalje aktivan. Dok je Beagle 2 trebalo da ispita samo mali deo površine, Mars Express Orbiter sadrži pregršt senzora za istraživanje cele planete. Za merenja ispod površine tu su stereo kamera visoke rezolucije (HSRC), spektrometar za mineraloško mapiranje u vidljivom i infracrvenom spektru (OMEGA) i ispodpovršinski radarski altmetar (MARSIS) pomoću kojeg je već pronađen led na južnom polu kao i brojni tragovi erozije, najverovatnije uzrokovani vodom. ") | | Mikroskopski snimak stene napravljen NASA roverom. Slika predstavlja deo stene od oko 3 cm širine (foto: NASA/JPL/Cornell/US Geological Survey) |
Za merenja u atmosferi i jonosferi koriste se sledeći instrumenti: planetarni Furijeov spektrometar (PFS), ultraljubičasti i infracrveni atmosferski spektrometar (SPICAM) i analizator energetski neutralnih atoma (ASPERA). Takođe, Mars Express će vršiti istraživanja pomoću svoje radio-veze sa Zemljom. Naime, pri normalnoj razmeni podataka Orbiter će da propušta radio-signale kroz jonosferu, atmosferu, površinu, pa čak i gornje slojeve tla planete. Na osnovu brzine kretanja sonde i jačine Marsovog gravitacionog polja, mogu se dobiti određeni podaci i o unutrašnjosti planete.Tokom svoje misije koja će trajati minimalno jednu marsovsku godinu (687 zemaljskih dana), Orbiter će da izvrši snimanje cele površine Marsa u visokoj rezoluciji od 10 metara po pikselu, a određenih polja i u superrezoluciji od 2 metra po pikselu. Zatim će izvršiti snimanje mape mineralnog sastava površine Marsa u rezoluciji od 100 m, kao i određivanje strukture planete ispod površine do dubine od nekoliko kilometara. Takođe, podaci sa ovog satelita pomoći će u mapiranju sastava atmosfere i određivanju njene cirkulacije oko planete, utvrđivanju efekata uticaja atmosfere na površinu Marsa i proveravanju interakcije atmosfere sa solarnim vetrovima. Što preko orbitera što direktnom komunikacijom sa bazama u Kaliforniji, Španiji i Australiji, roveri američke misije dnevno prenesu do 5 gigabita podataka koji se dalje obrađuju. Pošto se fotografije najčešće sklapaju u velike mozaike koji predstavljaju određene predele, postavlja se problem tačnosti boje na snimcima. Pored toga, kamere koriste čak 14 različitih filtera, što za snimanje Sunca što za snimanje određenih stena. Iako tako snimljene fotografije mnogo znače naučnicima u okviru datog eksperimenta, na njima se ne vidi kako zapravo dati prizor na Marsu „stvarno” izgleda. Zato svaka fotografija biva naknadno obrađena u skladu sa preko 100.000 snimaka koji su snimljeni kamerama rovera na Zemlji u vakuum-komorama i služe kao referentni model. Takođe, svaki od rovera na sebi nosi „kalibracionu metu”. Ovaj „sunčani sat” ima beli, sivi i crni prsten i oko njih crvenu, plavu, zelenu i žutu pločicu, tako da u svakom trenutku može da se utvrdi kako Sunce menja odnos boja u senci. Ovaj proces vizualizacije digitalnih slika, koji mi uzimamo zdravo za gotovo, mnogo je napredovao od svojih prvih dana. ") | | Stena koju je Spirit načeo bušenjem da bi istražio svež uzorak minerala (foto: NASA/JPL) | |
Šezdesetih godina kada je sonda Mariner slala slike Marsa, naučnici su ručno bojili crno-bele slike sastavljene na osnovu nula i jedinica. Takođe, iako je sistem gotovo savršen, na dugom putu od Marsa do Zemlje može doći do gubitka podataka, pa se na slikama dobijaju crna područja. Na svu sreću, ovi ispadi se brzo primete i za 12-16 minuta, koliko treba radio-signalu da stigne do rovera, dati region može ponovo biti snimljen.Pre nego što je počelo kretanje rovera po Marsu, brojni testovi su se obavljali ovde, na Zemlji. U pustinji Mohave se još od 1999. godine vrše probne vožnje rovera. Glavni akter ovih testova je rover FIDO odnosno Field Integrated Design and Operations (Integrisan terenski dizajn i operacije). Kao i roveri koji su sada na Marsu, FIDO radi pod Wind Riverovim operativnim sistemom VxWorks 5.5. VxWorkx je najrasprostranjeniji među operativnim sistemima koji su real-time (kada se sistem podigne, sve promene se izvode bez gašenja uređaja). No, dok FIDO koristi običan Pentium procesor na 266 MHz, u roverima kuca provereni 32-bitni RISC procesor koji je pre šest godina pokretao i Sojourner. U pitanju je RAD6000 iz BAE Systemsa, varijacija PowerPC procesora koja je otporna na radijaciju, ima integrisanih 128 MB DRAM-a i izvršava oko 20 MIPS-a. Takođe, kompjuteri koji pokreću rovere imaju dodatnih 256 MB fleš memorije. Simbolično, softver kojim kontrolori u JPL centru diriguju roverima nosi ime Maestro. Pored usmeravanja rovera, ovaj alat upravlja njegovim kamerama i svim naučnim instrumentima. Kako je rover ograničen samo komandama koje mu Maestro zadaje, moguće je obavljanje više analiza odjednom (npr. panoramsko fotografisanje, kopanje i spektrometrija). Pre šest godina Sojourner je aterirao u Ares Vallis, jedan od najstenovitijih regiona na Marsu, da bi mogao da analizira što raznovrsnije uzorke, ali sa njegova 32 cm visine navigacija nije bila baš laka. Iako su Spirit i Opportunity visoki preko 150 cm i oba su se spustila u predele bez velikih stena, za brz tok misije precizno kretanje je veoma bitno. Tako novi roveri imaju tri puta više „očiju” od svog starijeg brata. Sem panoramske kamere, pri kretanju roverima pomažu i četiri kamere za izbegavanje prepreka i dve kamere za navigaciju. Kamere za izbegavanje prepreka su fiksne kamere koje snimaju tri metra neposredne okoline rovera i imaju vidno polje od 120 stepeni. Navigacione kamere su stereo-kamere na „vratu” i „glavi” rovera i imaju vidno polje od samo 45 stepeni, ali su pokretne i pomažu kontrolorima za preciznije određivanje putanje rovera.  | | NASA rover Spirit, viđen očima umetnika (slika: DPA) |
No, i pored svih mera predostrožnosti, tu je uvek faktor neočekivanog. Tako je tokom prvih nekoliko dana Spirit imao problema pri silasku s lendera zbog nedovoljno izduvanog zaštitnog vazdušnog jastuka, a zatim je nekoliko nedelja kasnije zbog softverske greške Spirit bio nepokretan dobre dve nedelje, no kada je problem otkriven, usledile su dobre vesti. Veliki korak za robota učinjen je sedamnaestog februara kada je Spirit, prešavši više od dvadeset jednog metra u jednom danu, za preko šest metara oborio dosadašnji rekord u kretanju po površini Marsa (Sojourner, 1997. godine). Ovo je bitno zato što se Spirit, u trenutku kada pišemo ovaj tekst, nalazi na samo 245 metara od kratera Bonneville u kojem će tražiti tragove vode. Iako se ne očekuje da će roveri prelaziti više od 40-50 m dnevno, maksimalna brzina u idealnim uslovima mogla bi da bude i 100 m na dan. Osnovni razlog za prevaljivanje sve veće deonice svakog dana jeste to što sistem za autonavigaciju postaje sve brži i sve ređe su potrebne korekcije sa Zemlje.Ni drugi NASA šetač po Marsu nije bio pošteđen dečjih bolesti. Grejni elementi na roveru Opportunity uključili su se sami od sebe i počeli da troše struju. Na svu sreću, problem nije bio toliko ozbiljan da uzrokuje pregrevanje Opportunityja tokom marsovskog dana. Tokom prvih meseci mogli smo da vidimo impresivne 3D slike u do sada neviđenoj oštrini, dobijene kombinacijom podataka iz kamera i visinomera iz orbitera. U nadolazećim mesecima bez sumnje ćemo sve vreme biti bombardovani vestima i slikama sa Marsa, a i kada Spirit i Opportunity pošalju svoje poslednje bitove podataka, Mars Express Orbiter će nastaviti sa mapiranjem Crvene planete. Nakon toga okrenućemo se budućim misijama kao što su NASA Mars Reconnaissance Orbiter i Phoenih, pa zatim i ESA Aurora, no to su priče za neku sledeću priliku. Dragan KOSOVAC | | 
|





")
")
")
")
")